Динамика
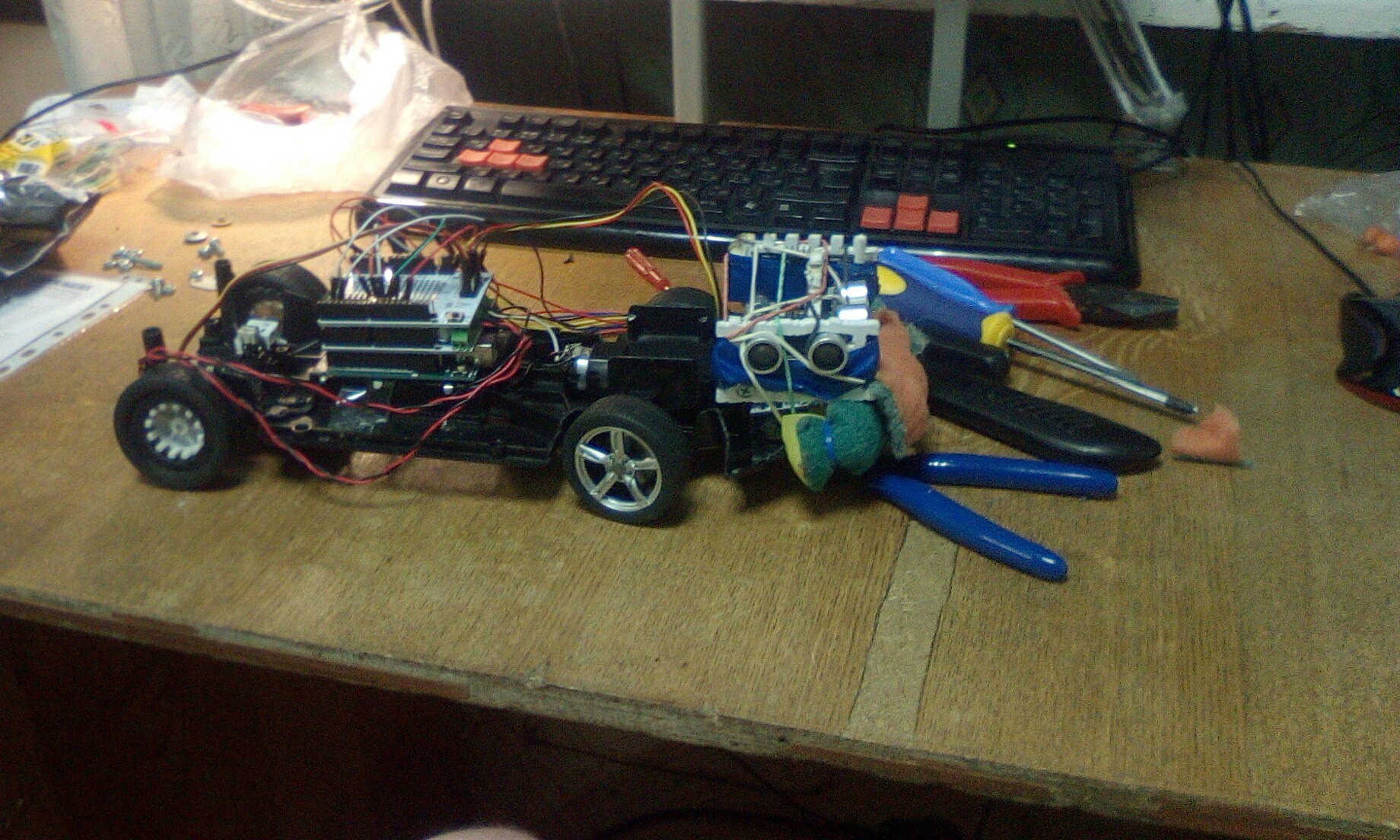
ROB-10701Робот создан на базе Arduino Uno. Имеются аналоговые датчики линии и ультразвуковые дальномеры для отслеживания расстояния до стен. В качестве тяговых двигателей использованы готовые коллекторные двигатели со встроенным редуктором. Рулевые колеса соосны и управляются также коллекторным двигателем.
Файлы
Исходный код (629 байт)
Добавлен 10.12.2024
Дополнительные файлы
Изображение_робота_v2.jpg
(547.19 КБ)
{kind=link}
Добавлен 10.12.2024