Semelion GT77
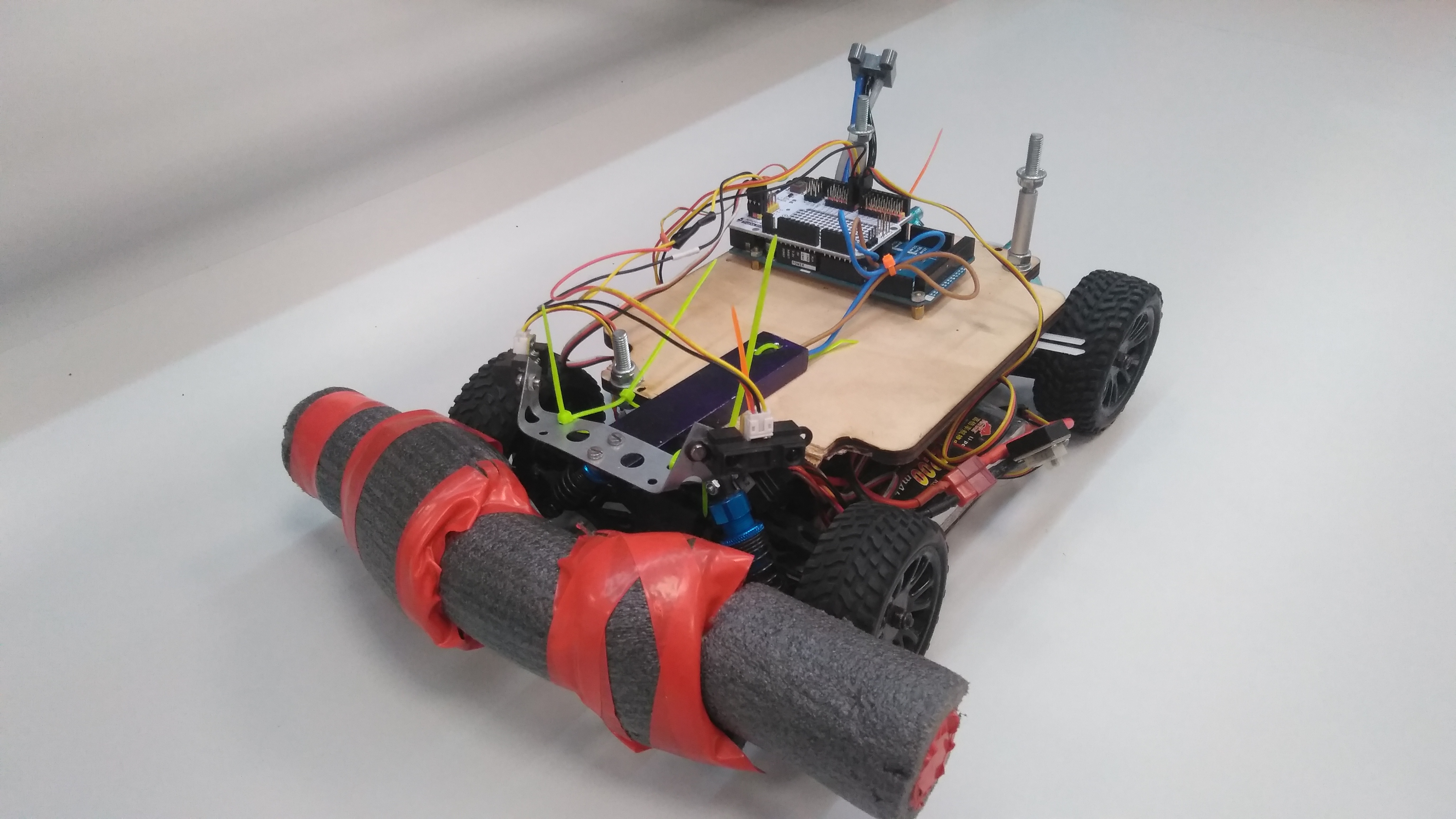
ROB-24480Робот построен на четырехколесной платформе с коллеторным двигателем постоянного тока, дифференциалом и рулевой трапецией. Имеет на борту контроллер Arduino uno для автономного управления роботом. Передвигаться по лабиринту помогают ультрозвуковые датчики HC-SR04. Для управления двигателем используется драйвер двигателей L298P. Источником питания является Ni-Mh аккумулятор с напряжением 7,2 вольта. Для корректного питания всех бортовых потребителей используется стабилизатор напряжения LM2596S, настроенный на 6 вольт. Стоп-линию машина определяет с помощью датчика освещенности Amperka line sensor.
Файлы
Добавлен 10.12.2024
Добавлен 10.12.2024
{kind=link}
Добавлен 10.12.2024