Кибер Ёж 2
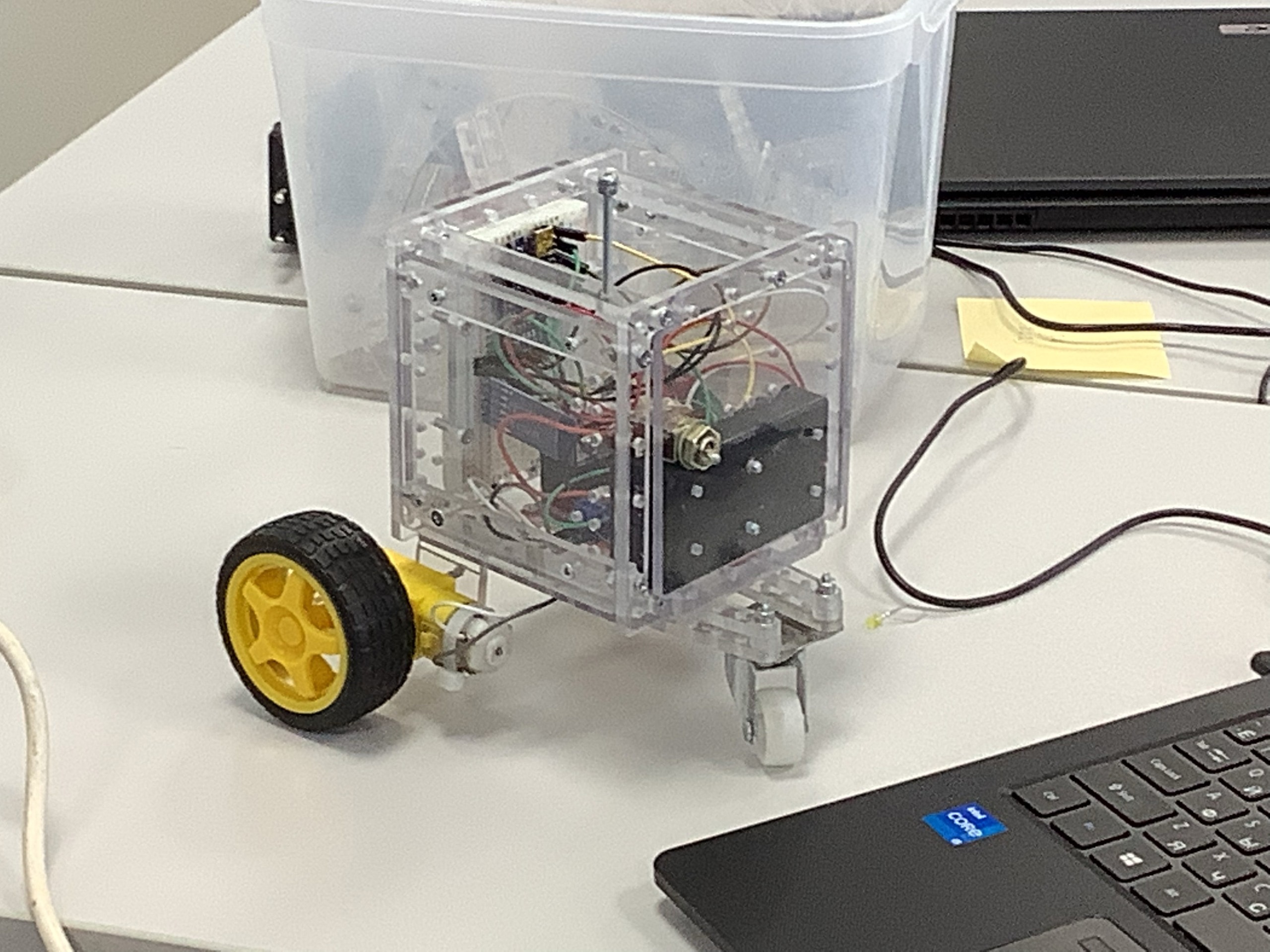
ROB-54598Робот для Робофутбола на базе Arduino Nano на макетной плате
Питание от двух Li-Ion аккумуляторов 18650, драйвер двигателя на L298N
Пинатели для мяча впереди планируются на основе сервомоторов SG90 или MG995, еще в процессе сборки, испытания и установки
Управление по беспроводному каналу по Bluetooth модулю HC с телефона с установленным приложением
Конструкция робота оптимизирована под выполнение требований Регламента “диаметр не более 220 м” и “способность пнуть мяч не менее чем на 50 см”
Название обусловлено названиями других роботов линейки обучения Большакова Александра - названия животных: “Лис”, “Заяц”, “Бобёр” и т.д.
{kind=link}
{kind=link}
{kind=link}
{kind=link}