Фиксики
ROB-64087Робот Сумойст Средней общеобразовательной школы № 667 Невского района
В Открытые зимние состязания Санкт-Петербурга по робототехнике 2023
используемые в этом соревновании, называются сумоботами. Инженерные задачи заключаются в том, чтобы спроектировать своего робота который сумеет вытолкнул своего соперника с плоской арены и самому остаться невредимым.
Состав робота Команды Фиксик: Тюрин Никита 5 класс.
Подключаем моторы к портам микрокомпьютера: «В» - левый мотор; «С» - правый мотор. Без использования датчиков. В качестве крепления проводов используется декор (щиты) из набора lego Education Eva 3

- Микроконтроллер Eva 3 является компьютерным мозгом робота. Операционной системой микрокомпьютера является Linux. Датчики опрашиваются со скоростью в 1 Гц
- 2 мотора lego Education Eva 3 называют большим двигателем, сервоприводом или сервомотором.
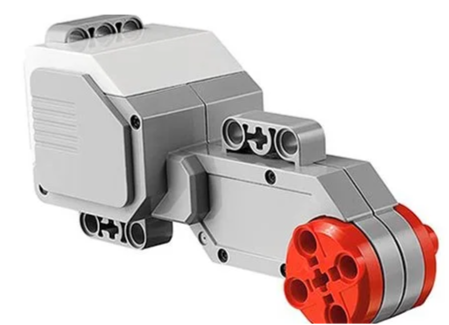
В моторе находится встроенный датчик вращения с разрешением в 1 градус для точного контроля угла вращения. Большой мотор оптимизирован для приводных механизмов роботизированных платформ различных видов и назначений.
- Скорость вращения большого мотора 160 -170 оборотов в минуту;
- Вращающий момент 20 ньютон/метр;
- Пусковой момент 40 ньютон/метр, то есть медленнее, но мощнее. Еще вращающий момент называют крутящий момент или момент силы
Большой мотор поддерживает автоматическую идентификацию с программым обеспечением lego Education Eva 3 . двигатель можно соединять с любыми выходными портами А, В, С,Д. по умолчанию большие моторы подключаются к портам В и С.

Большой мотор содержит в себе редуктор, то есть набор шестиренок для понижающей передачи. За счет этого мотор становится более мощным, но уменьшается скорость. Шестиренки сделаны из пластмассы, поэтому они бысрее изнашиваются при значительном усилии могут сломаться. При этом двигатель практически не подлежит восстановлению.
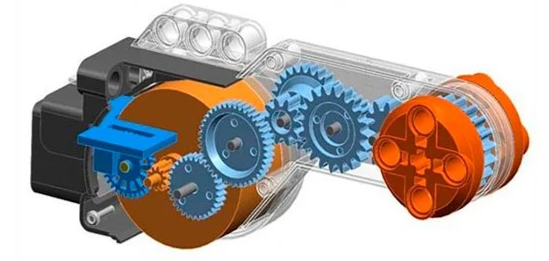
Если двигатель расположить так, чтобы вращающая часть находилась справа внизу рисунка, то вращение двигателя происходит по часовой стрелке при заданных положительных значениях скорости и против часовой стрелки, когда заданные значения скорости отрицательны. Большой мотор lego Education Eva 3 всего используется для передвижения робота. Робот может быть сделан в виде машинки, шагающего робота, робота для преодоления препятствия и других моделей.
У робота EPINES используется 2 колеса и шарик управления роботом.
- детали lego Education Eva 3 из наборов вес 645 г.
- Размеры робота заметно меньше предельных 15´15см.
Программирование моего робота будет с помощью интерфейса микроконтроллера lego Education Eva 3 .
В микроконтроллере есть возможность программирования при помощи самого микроконтроллера lego Education Eva 3 . есть двенадцать программируемых блоков при помощи которых можно создавать программы.
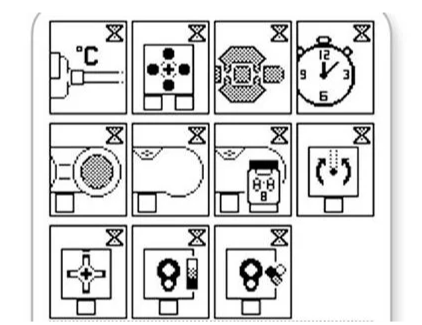
Можно писать сложные программы без использования компьютера. Эту программу можно экспортировать на компьютер. На компьютере программу можно улучшить при помощи программного обеспечения lego Education Eva 3. После этого её снова можно загрузить на микрокомпьютер и проверить на практике. Это является очень полезной функцией.
Микроконтроллер lego Education Eva 3 соединяется с компьютером посредством USB – шнура.
Всего существет три способа установки соединения микроконтроллера lego Education Eva 3 с компьютером:
- Через USB – шнур;
- С помощью встроенного модуля Blutooth;
- Через Wi-fi приемник.
Включить и выключить микроконтроллер можно путем нажатия на кнопку, находящуюся в центре шестикнопочного интерфейса микроконтроллера lego Education Eva 3. После нажатия индикатор статуса модуля загорится красным цветом.
При этом будет видно окно запуска. После тока как иникатор загорится зеленым цветом, модуль lego Education Eva 3 будет готов к работе.
Файлы
Добавлен 10.12.2024