Лицей 3.29
ROB-77452Команда Лицей3.29
Практическая олимпиада по робототехнике "Ардуино".
Задача «Маневрирование». Условие: переместить банки с одной стороны перекрёстка на другую, объезжая кубики расставленные в центрах перекрёстков.
Подробный алгоритм представлен в программе робота.
Размеры робота 200х200х150 мм (Робот на видео находится внутри стартовой зоны 200х200 мм), размеры банок 66х150 мм, размеры кубиков 30х30х30 мм
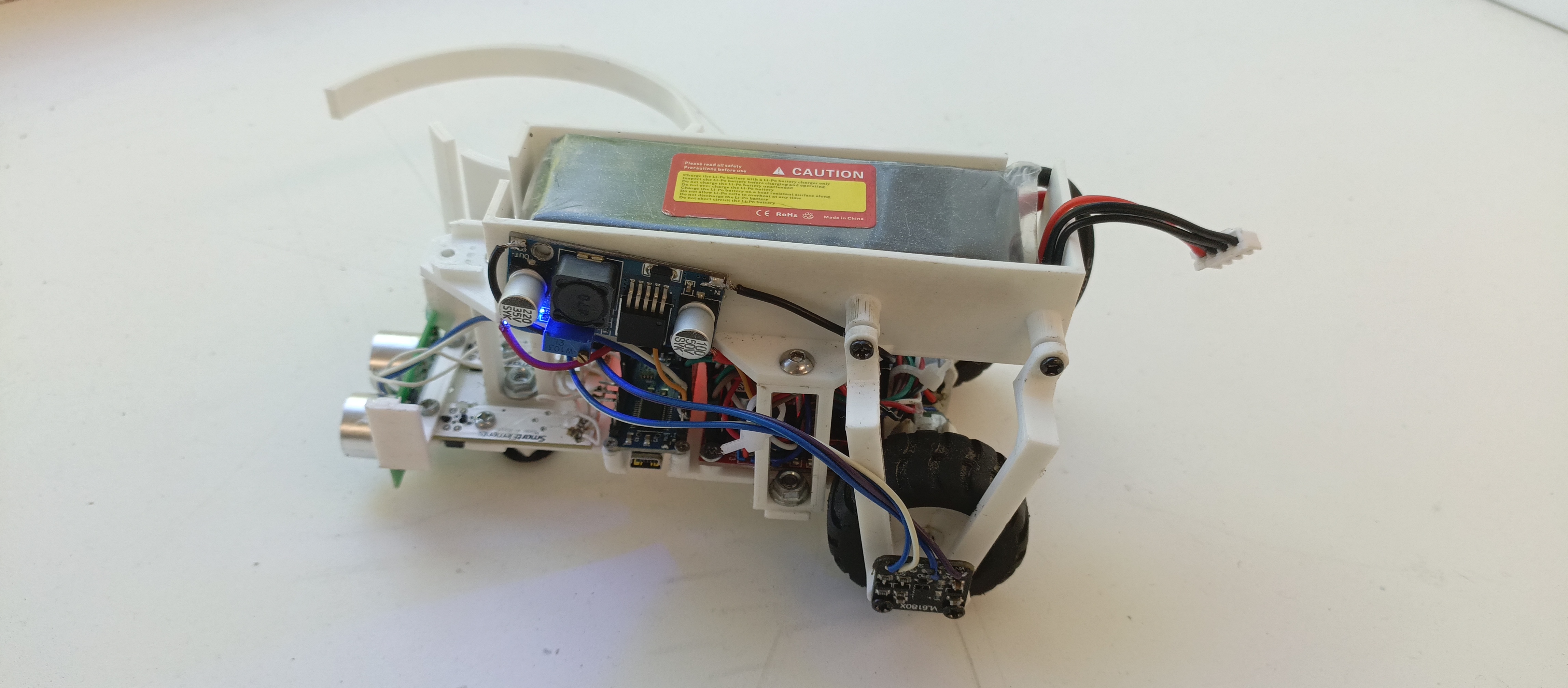
Состав робота:
- Контроллер arduino nano чип atmega 328P
- Драйвер моторов L298N
- Моторы N20
- Аккумулятор fireBull 12v 2200mAh
- Датчик расстояния (Time of Light) VL6180X
- Датчик расстояния (ультразвуковой) US-015
- Датчик линии (инфракрасный) TCRT5000(аналоговый)
- Сервопривод SG90
- Преобразователь напряжения XL4005
Корпус робота и крепления датчиков напечатаны на 3д принтере, 3д модели формата .stl в архиве models.zip прикреплены в дополнительных файлах.
Шасси робота состоят из двух моторов и одной скользящей пластины. Захват банки осуществляется при помощи лапки установленной на сервопривод, он расположен на правой стороне робота. Объезд препятствий осуществляется при помощи датчика расстояния VL6180X, он расположен на левой стороне робота. Обнаружение препятствий перед роботом осуществляется при помощи датчика расстояния US-015, он расположен спереди робота.
На видео плохо видно желтые круги, но во время заезда робот не разу не выехал за пределы разрешённой зоны. Робот переместил 3 банки (30 баллов), сдвинул 1 кубик (-10 баллов), время заезда 1:36.
Код прикреплён в отдельном файле main.txt
Фотографии частей полигона и робота прикреплены в дополнительных файлах. Также там находится электронная схема робота.
Файлы
Добавлен 27.12.2024
Добавлен 27.12.2024
Дополнительные файлы
{kind=link}
Добавлен 27.12.2024
{kind=link}
Добавлен 27.12.2024
{kind=link}
Добавлен 27.12.2024
{kind=link}
Добавлен 27.12.2024
Добавлен 27.12.2024
{kind=link}
Добавлен 27.12.2024